
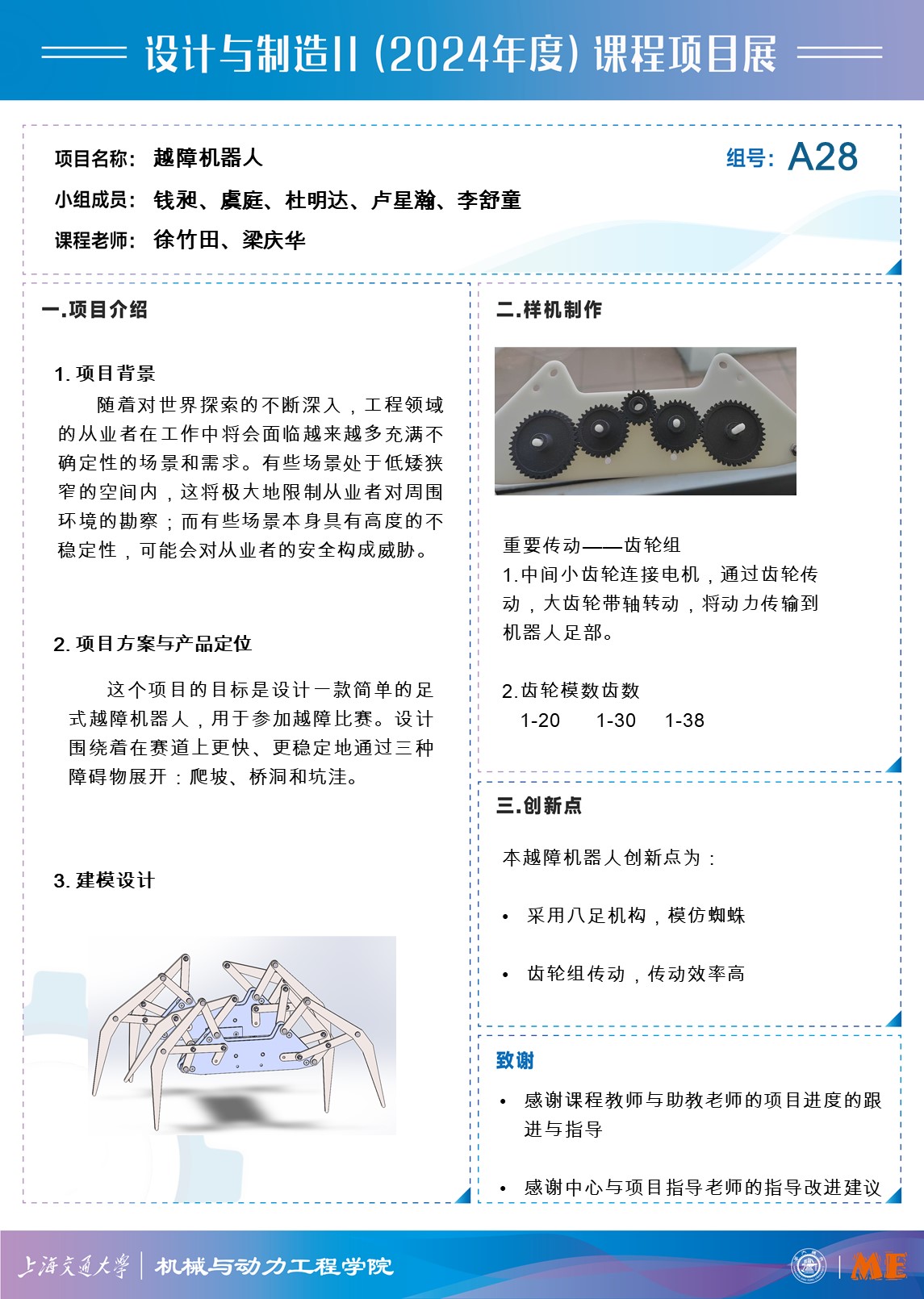
In our project, an eight-legged bio-mimetic spider type robot is designed to participate in the obstacle crossing competitions.
The project aims to design a foot-type obstacle crossing robot to cross obstacles such as ramps, bridge holes and potholes by putting the knowledge learned in the course into practice.
Through design, modeling, motion and mechanics simulation, 3D printing and assembly, we create an eight-legged spider-like obstacle crossing robot driven by two motors.
