
复杂地形的越障作业对足式机器人而言是一个巨大的挑战,本项目拟创新性的提出一款有较好地上下坡以及翻越坑洞的机器人,为复杂地形的机器人越障提供参考。本产品利用平行四边形连杆机构设计一款四足式越障机器人,专门用于直线赛道的越障作业,具有良好越障力与可靠性。
设计机器人针对复杂地形能够具有较好的越障性能。
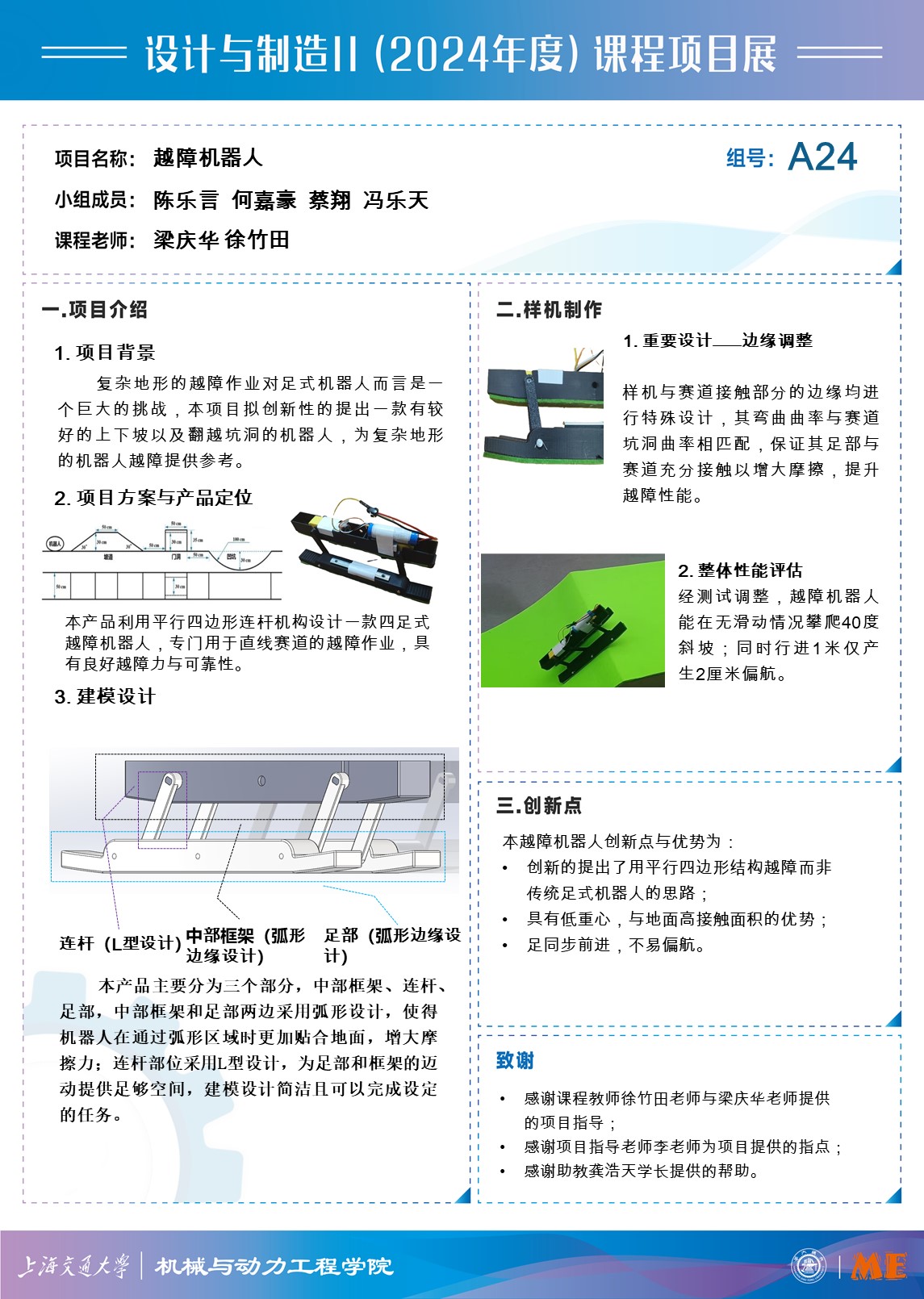
样机与赛道接触部分的边缘均进行特殊设计,其弯曲曲率与赛道坑洞曲率相匹配,保证其足部与赛道充分接触以增大摩擦,提升越障性能。经测试调整,越障机器人能在无滑动情况攀爬40度斜坡,能够较好地上下坡和跨越坑洞。
