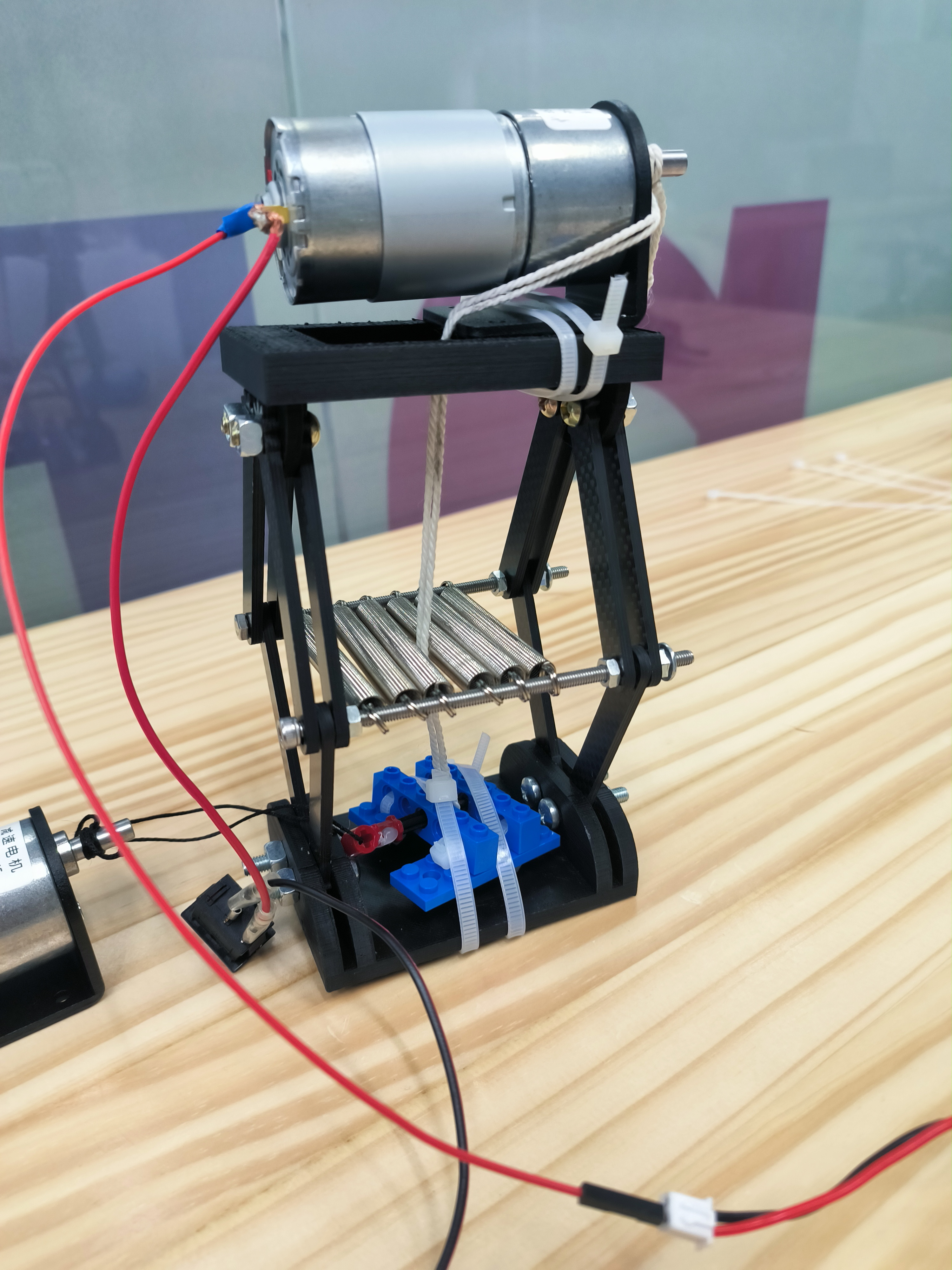
本项目为跳高机器人,使用弹簧作为能量储存机构,主体结合了连杆、齿轮组等机构的设计,使用多个电机驱动,能够实现跳跃以及控制起跳角度的功能,并通过电路设计实现了自动释放的功能。
1. 实现跳跃功能并努力实现更高的高度;
2. 实现自动释放功能;
3. 控制起跳角度。
本项目成功设计出一款跳高机器人,在经过测试验证后,该跳高机器人能够成功满足所有的项目目标,并能实现原计划中的所有功能。