

The Jumping Robot project aims to develop an agile robot capable of vertical movement for applications such as search and rescue, disaster recovery, exploration, and entertainment. The robot's design focuses on overcoming obstacles, navigating rough terrain, and accessing hard-to-reach areas. Key engineering specifications include a jump height sufficient to clear a pole, landing accuracy within a 1m×1m area, a setup time under 30 seconds, and a compact size. The Simple Jumper concept was chosen for its balance of performance and cost, featuring a system with motor and battery installation, carbon fiber rods for stability, and a base for support. The motor compresses the mechanism to store energy in the carbon fiber rods, which is released to initiate the jump. Specific parameters, such as the dimensions of the carbon fiber rods and the motor, were carefully selected for optimal performance. The manufacturing plan includes 3D printing the motor housing and base, with other components purchased and assembled. The design allows for easy assembly, through some improvements, like reinforcing the triggering mechanism and optimizing material choices, could enhance reliability. Overall, the project presents an innovative approach to robot design, offering flexibility and potential for further improvement in terms of efficiency and robustness.
跳跃机器人项目旨在开发一种能够垂直移动的敏捷机器人,用于搜索和救援、灾难恢复、探索和娱乐等应用。该机器人的设计重点是克服障碍,导航崎岖的地形,以及进入难以到达的区域。关键的工程规范包括足以越过一根杆子的跳跃高度,1米×1米区域内的着陆精度,30秒以下的设置时间,以及紧凑的尺寸。选择简单弹跳机构是因为它性能和成本的平衡,构建了一个由电机和电池安装系统,碳纤维棒,和基础支撑组成的机构。电机压缩该机构,将能量储存在碳纤维棒中,碳纤维棒被释放以启动跳跃。具体的参数,如碳纤维棒和电机的尺寸,以最佳性能为目标仔细选择。制造计划包括电机外壳和底座的3D打印,以及其他组件的购买和组装。该设计易于组装,通过一些改进,如加强触发机制和优化材料选择,可以提高可靠性。总的来说,该项目提出了一种创新的机器人设计方法,在效率和鲁棒性方面为进一步改进提供了灵活性和潜力。
设计一个跳得尽可能高的机器人,跳过一根杆并在1m*1m的垫子上精准着陆,具有可重复性。
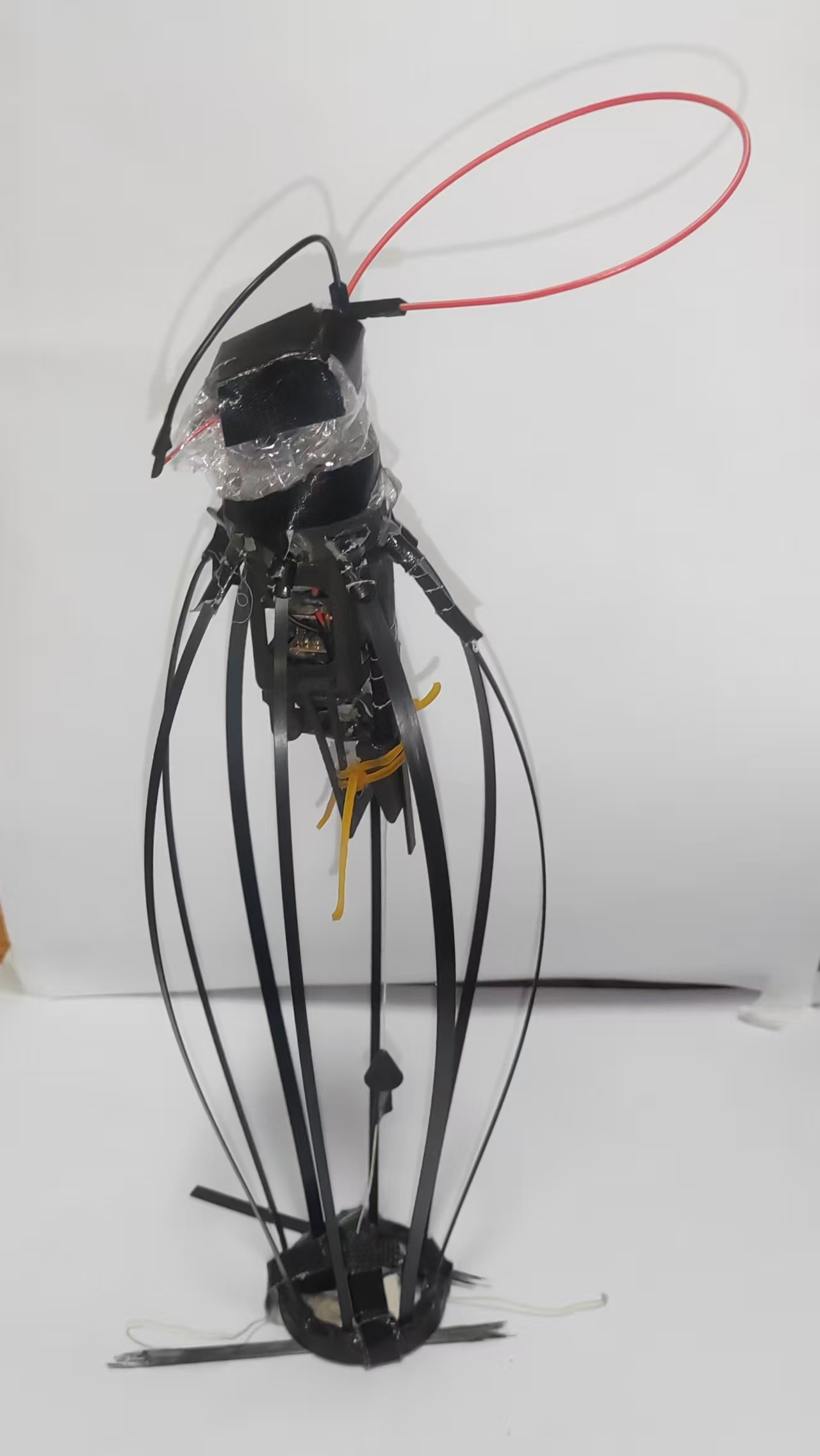
成功制造出一个可以跳约60cm左右高度的机器人
