

根据本课程与挑战赛的要求,我们设计并制造了一种足式越障机器人。我们的机器人包含四个子系统:身体、腿、驱动和电子,分别用于支撑、越障、传动与控制。我们首先设计了机器人的单自由度腿部结构,使其具有更好的稳定性和越障能力,并在 MATLAB 中模拟了单腿脚部运动,从而优化腿部参数。然后,我们在 SolidWorks 中进行了 CAD 和运动模块仿真,以测试越障能力。通过仿真确定我们的设计合理有效后,我们以合理的成本顺利完成了机器人的制作和测试,机器人成功地在平地上行走,并能跨越相对简单的障碍物。未来我们还可以通过使用轴承连接以提高装配精度、优化结构降低重心以提高稳定性、设计更高效的传动系统以提高效率来进一步改进。
Based on the requirements of this course and challenge, we designed and built a footed obstacle-crossing robot. Our robot contains four subsystems: body, legs, drive and electronics for support, obstacle crossing, transmission and control respectively. We first designed the single-degree-of-freedom leg structure of the robot for better stability and obstacle-crossing capability, and simulated the single-leg foot motion in MATLAB to optimize the leg parameters. We then performed CAD and motion module simulations in SolidWorks to test the obstacle-crossing capability. After determining through simulation that our design was reasonable and effective, we successfully built and tested the robot at a reasonable cost, and the robot successfully walked on flat ground and was able to cross relatively simple obstacles. In the future, we can make further improvements by using bearing connections to improve assembly accuracy, optimizing the structure to lower the center of gravity to improve stability, and designing a more efficient drive train to increase efficiency.
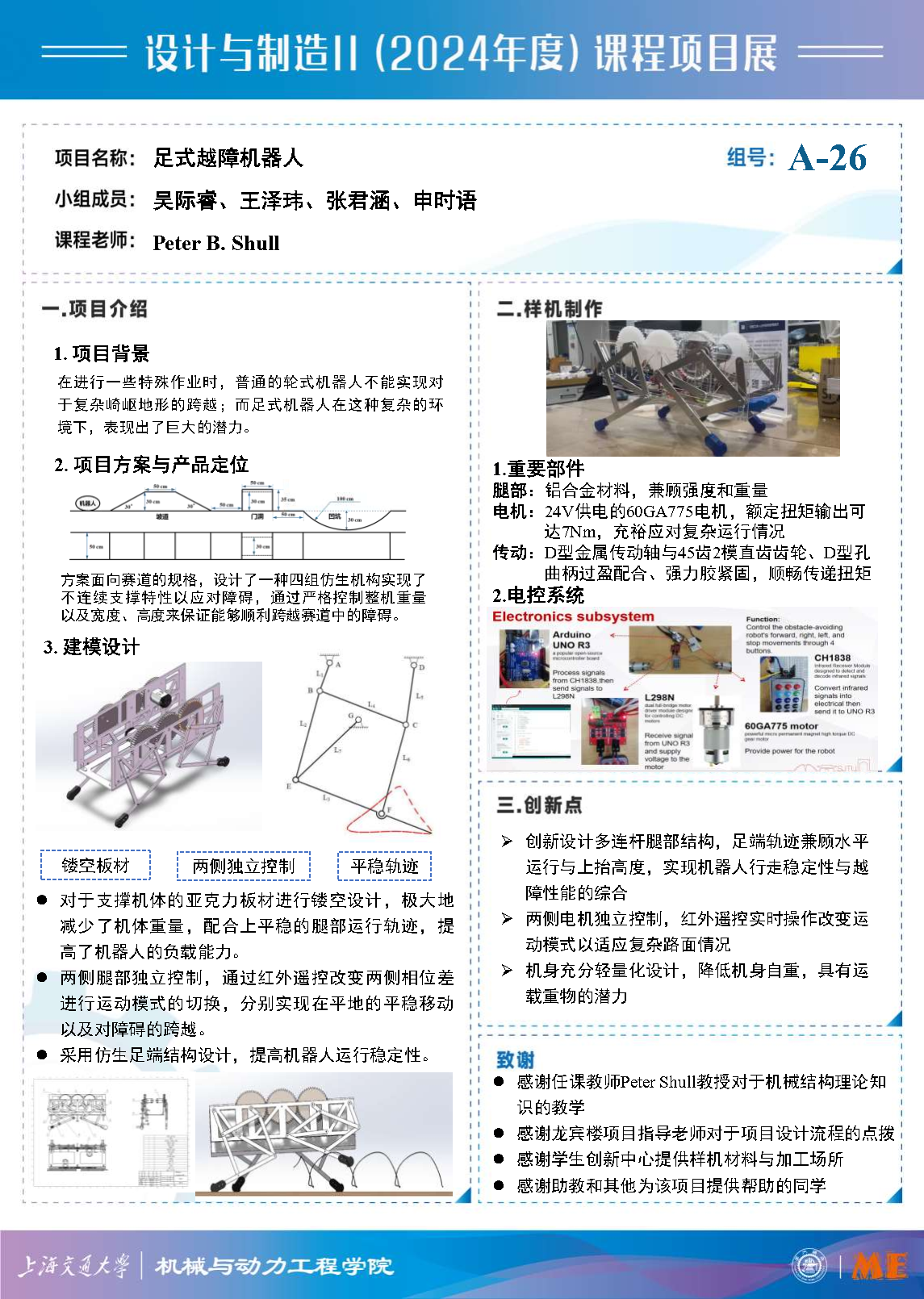
根据本课程与挑战赛的要求,设计并制造一种足式越障机器人,实现越障功能。
完成足式越障机器人的样机制作。
