
在本项目中,我们的主要目的是设计和制造一个步行机器人,以尽可能快速和稳定地完成穿越各种障碍物的任务。根据我们从课堂上学到的知识并在网上搜索,我们首先生成了三个概念。经过考虑,我们选择基于概念3的最终设计,因为它具有六条基于克兰连杆的腿和身体结构,因此具有稳定性、低重心和恒定速度。
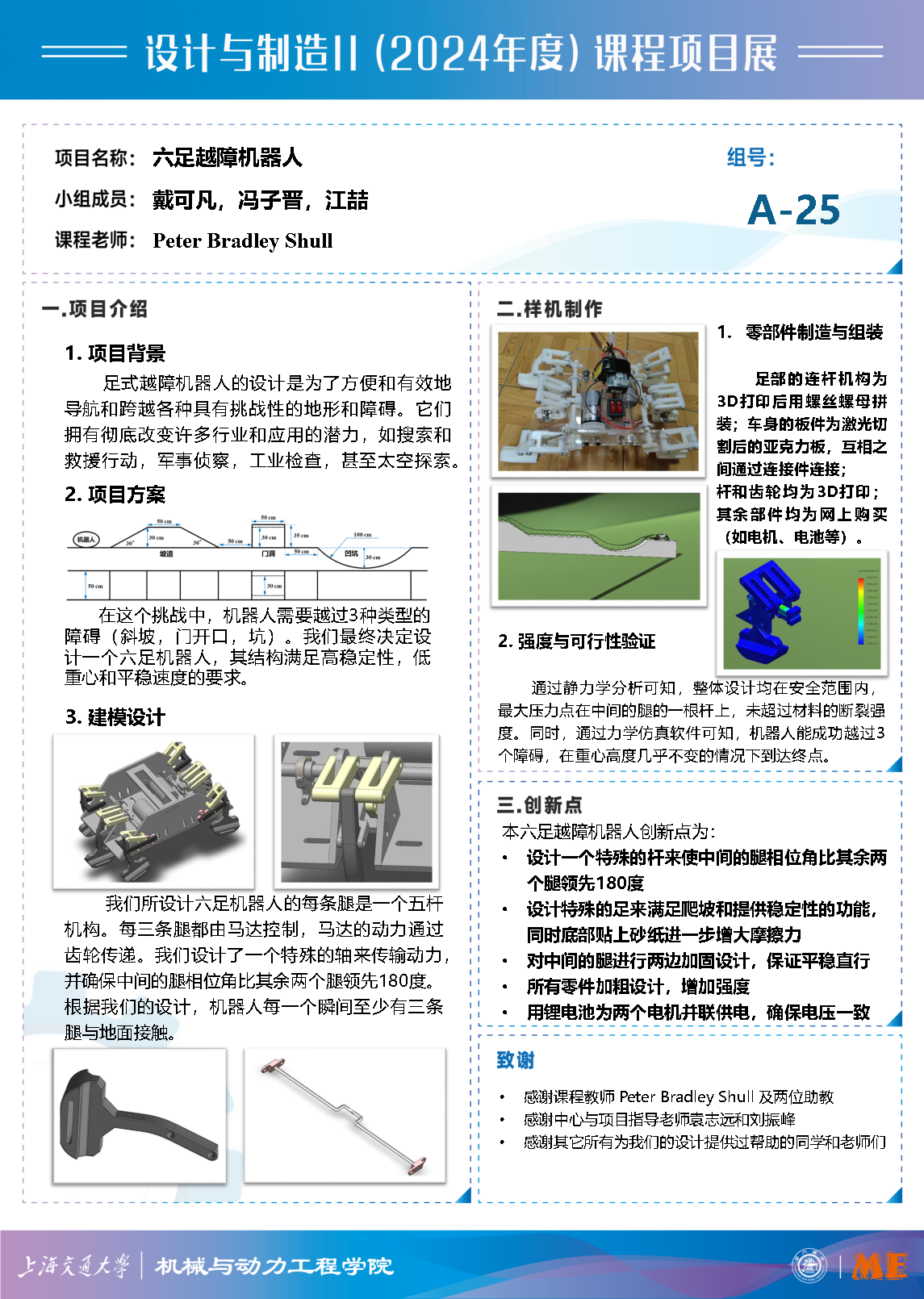
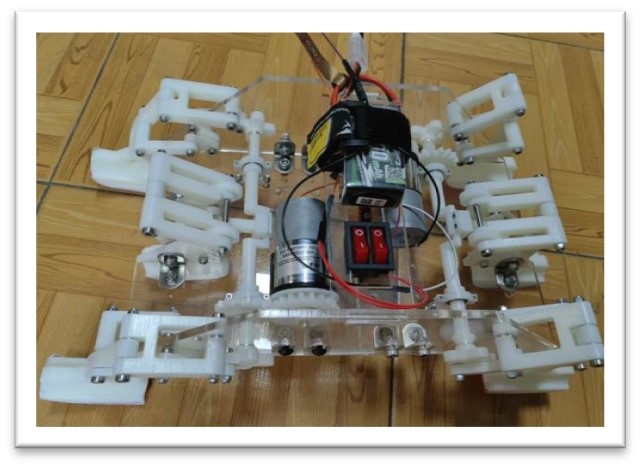
我们的最终设计是六足螃蟹状的越障机器人。它有六条腿,每条腿都是一个六杆机构。每三个支腿由电机控制,电机的动力由齿轮传递。我们设计了一个特殊的传动轴来传输动力,并确保中间腿的相位角领先其余两个腿 180 度。而根据我们的设计,每时时刻刻至少有三条机器人的腿在地面上。
我们使用树脂 3D 打印了所有连杆、轴、轴架和齿轮。我们在网上购买了预切割的亚克力板作为我们的底板。其余组件也是通过网络购买的。然后我们一步一步地组装,得到了原型1.0。
然而,原型 1.0 并不令人满意。它几乎无法站在地上,因为连杆的强度不够,而且中腿的结构不稳定。因此,我们重新设计了几乎所有的连杆并制作了原型2.0。事实证明,这是一个巨大的改进,并成功地解决了问题。我们进行了静态应力分析,发现我们改进的设计具有足够的强度。通过运动模拟,我们证明了它可以在地面上稳定行走并跨越不同的障碍物。
最后,我们完成了最终设计并制造了第二个2个原型。原型2.0不仅解决了原型1.0中发现的问题,而且在很大程度上满足了设计要求。
设计和制造一个步行机器人,以尽可能快速和稳定地完成穿越各种障碍物的任务。根据我们从课堂上学到的知识并在网上搜索,我们首先生成了三个概念。经过考虑,我们选择基于概念3的最终设计,因为它具有六条基于克兰连杆的腿和身体结构,因此具有稳定性、低重心和恒定速度。
六足螃蟹状的越障机器人
