
路面机器化工作中,履带式机器人及轮式机器人的跨障能力较弱、稳定性差,如何提高路面机器人对各种地形的适应能力,成为了亟待解决的问题。
本项目设计使用足式结构实现机器人的行走,通过单片机遥控其运动方向与速度。
设计八足机器人以实现机器人在复杂环境中的行走和其他控制。
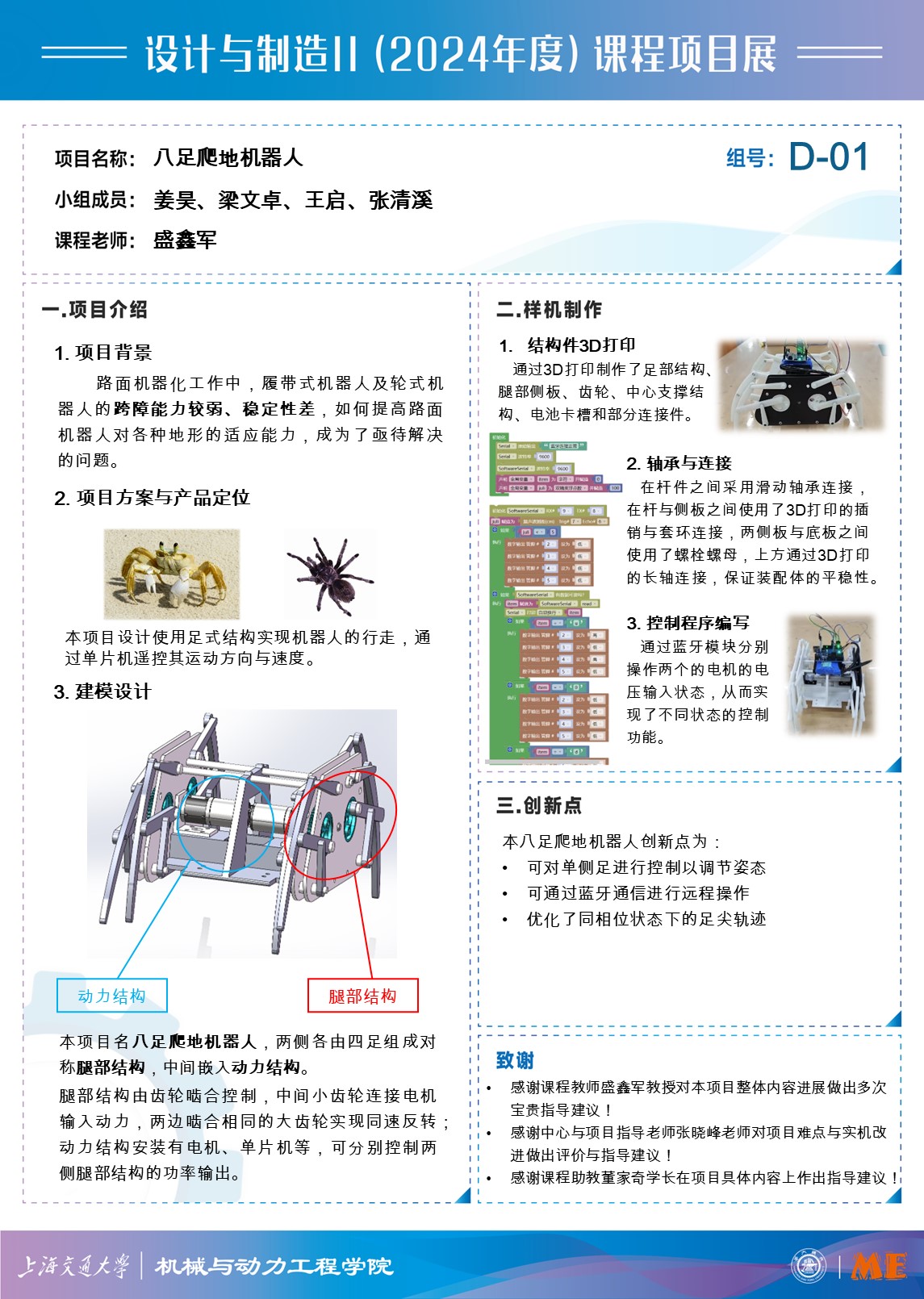
本项目名八足爬地机器人,两侧各由四足组成对称腿部结构,中间嵌入动力结构。
腿部结构由齿轮啮合控制,中间小齿轮连接电机输入动力,两边啮合相同的大齿轮实现同速反转;动力结构安装有电机、单片机等,可分别控制两侧腿部结构的功率输出。
本八足爬地机器人创新点为:
•可对单侧足进行控制以调节姿态
•可通过蓝牙通信进行远程操作
•优化了同相位状态下的足尖轨迹
