
足式越障机器人是一种创新型的移动机器人,与传统的轮式或履带式机器人相比,其更具灵活性和适应性,能够在各种地理环境中高效移动,本项目是面向挑战赛赛道设计而成的六足越障机器人。
本项目面向挑战赛三个障碍:上坡、门洞、凹坑而设计,以切比雪夫机构为基础,通过设计连杆尺寸比例以及足部形状,电机带动齿轮传动,达到越障的目的。
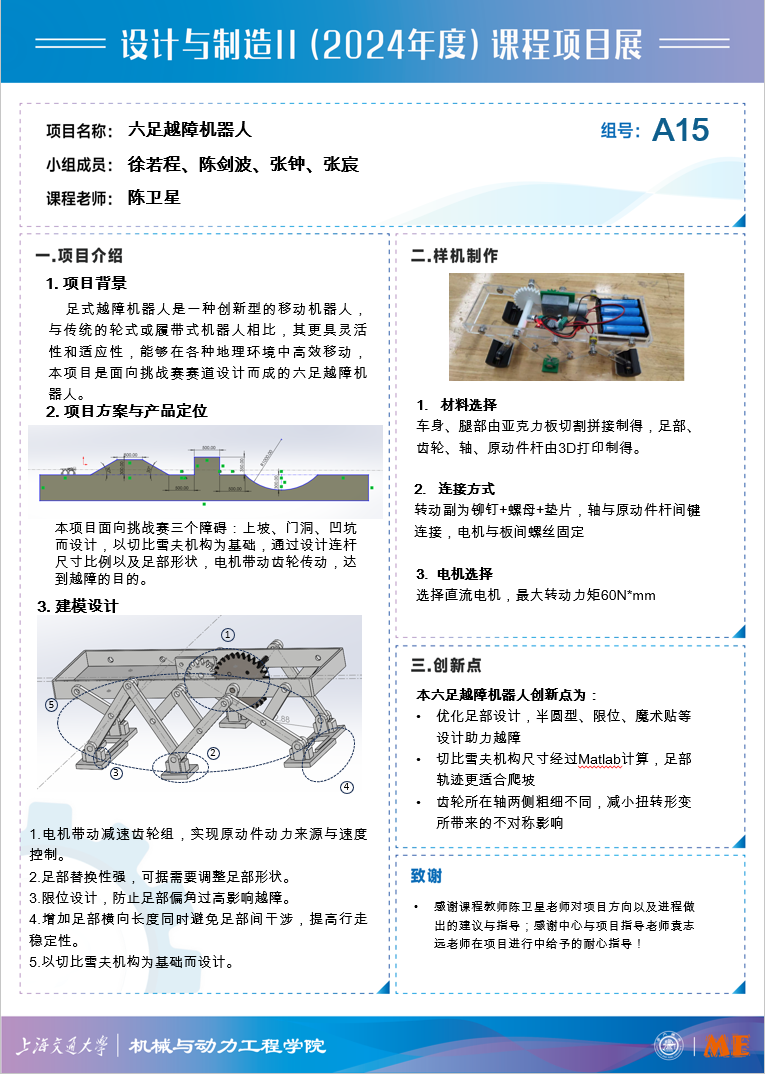
建模设计:
1. 电机带动减速齿轮组,实现原动件动力来源与速度控制。
2. 足部替换性强,可据需要调整足部形状。
3. 限位设计,防止足部偏角过高影响越障。
4. 增加足部横向长度同时避免足部间干涉,提高行走稳定性。
5. 以切比雪夫机构为基础而设计。
创新点:
1. 优化足部设计,半圆型、限位、魔术贴等设计助力越障
2. 切比雪夫机构尺寸经过Matlab计算,足部轨迹更适合爬坡
3. 齿轮所在轴两侧粗细不同,减小扭转形变所带来的不对称影响
