机器人具有高效、精确等特点,能够提升行业效率,降低人力成本,在多领域得到了广泛应用。机器人在其使用场景下对于行走、承载、智能等方面都有相应的要求,在部分场景中,机器人需要能够在复杂地形正常行走和工作。如果缺乏越障能力,容易出现机器人受阻、故障、损坏等情况。本项目的重点正在于机器人对于复杂地形的越障能力。
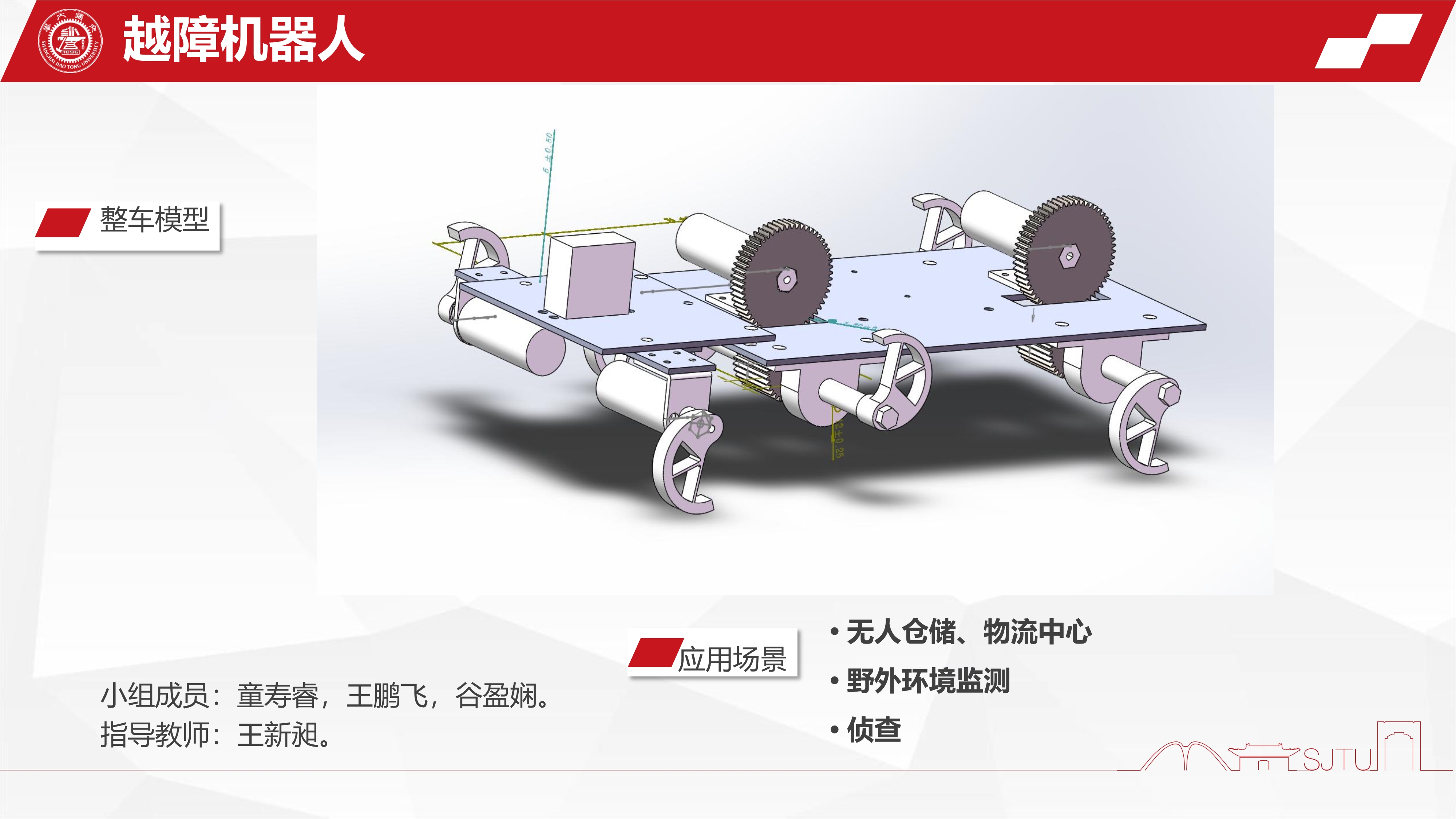
采用轮足式设计,既具备轮式机器人的高速移动特性,又具备在复杂地形上的越障功能
设计了采用轮足设计的越障机器人,并完成样机制作