
在工业中,广泛需要将零部件从一个工位移动到另一个工位的自动化机构。其中轻薄零件的移取在自动化生产线、包装和分拣、电子元器件处理等方面有重要应用。
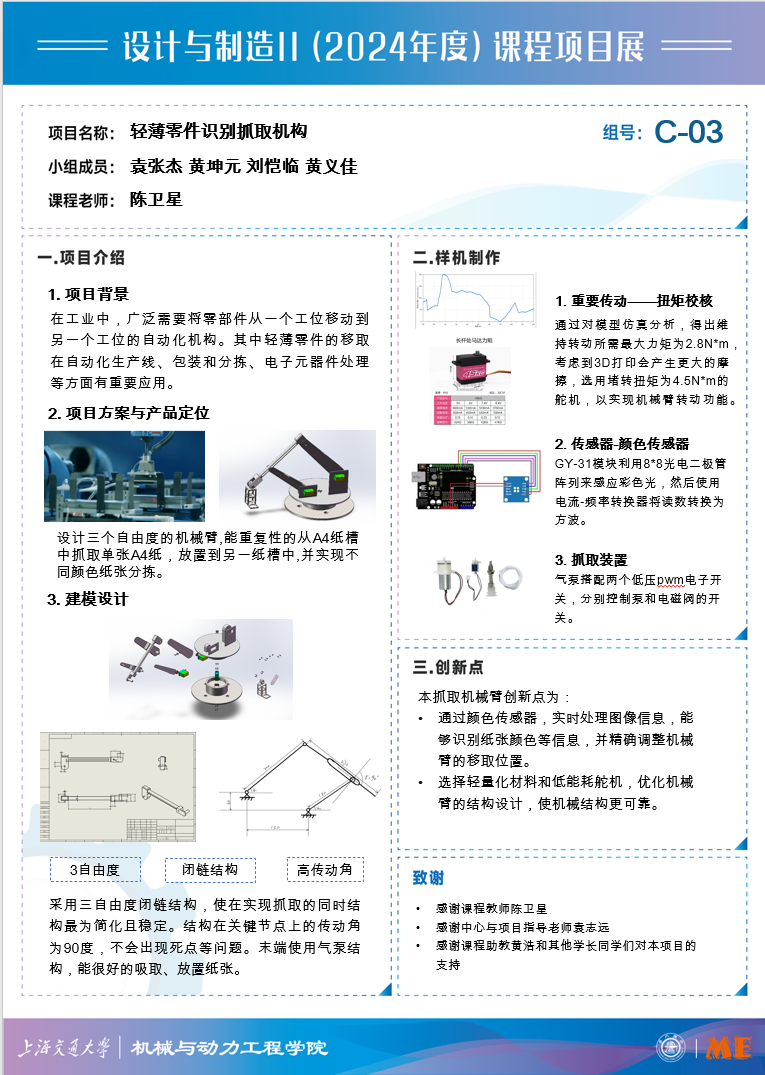
设计三个自由度的机械臂,能重复性的从A4纸槽中抓取单张A4纸,放置到另一纸槽中,并实现不同颜色纸张分拣。
采用三自由度闭链结构,使在实现抓取的同时结构最为简化且稳定。结构在关键节点上的传动角为90度,不会出现死点等问题。末端使用气泵结构,能很好的吸取、放置纸张。
本抓取机械臂创新点为:
•通过颜色传感器,实时处理图像信息,能够识别纸张颜色等信息,并精确调整机械臂的移取位置。
•选择轻量化材料和低能耗舵机,优化机械臂的结构设计,使机械结构更可靠。
