
传统轮式和履带式移动机器人在复杂地形中易受限制,而仿生足式机器人通过模仿自然界动物的运动机制,具有优异的越障能力与地形适应性,应用前景广阔,逐渐成为机器人领域的研究热点。本项目以挑战赛要求(可跨越斜坡、窄洞、凹陷地面等不同类型障碍)为基础设计了一款四足式行走可越障机器人: 采用并联式腿部连杆设计增加机器人行走的稳定性和承载能力;同时为每条腿增加肩关节的活动度以实现更灵活的运动方式,提高越障能力。
本产品具有如下基本要求:
•四足式行走可越障机器人
•可跨越斜坡、窄洞、凹陷地面等不同类型障碍
•电机数量控制在一定范围内,保证成本低廉
•可以承载一定的重量并保持行走稳定性
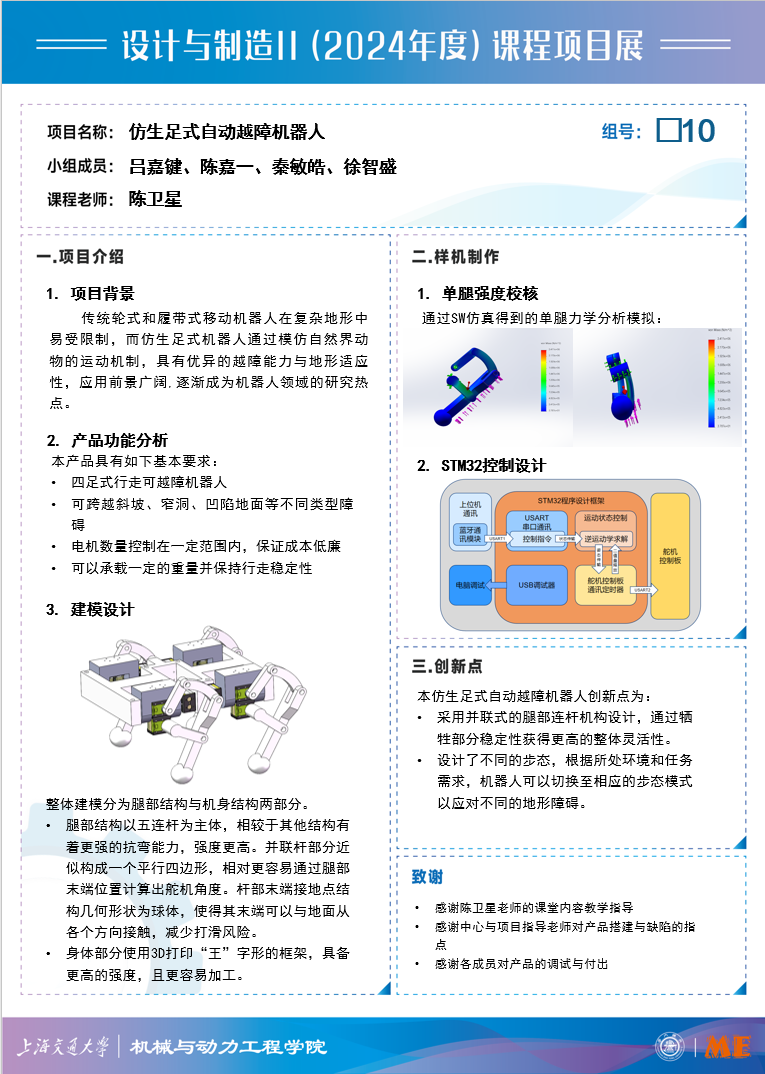
项目的整体建模:①腿部结构以五连杆为主体,相较于其他结构有着更强的抗弯能力,强度更高。并联杆部分近似构成一个平行四边形,相对更容易通过腿部末端位置计算出舵机角度。杆部末端接地点结构几何形状为球体,使得其末端可以与地面从各个方向接触,减少打滑风险。②身体部分使用3D打印“王”字形的框架,具备更高的强度,且更容易加工。
机器人控制原理:采用stm32控制板和Hiwonder总线舵机控制器对舵机进行控制。整体步态为walk步态的临界状态,以达到更快的行走速度。
本仿生足式自动越障机器人创新点为:采用并联式的腿部连杆机构设计,通过牺牲部分稳定性获得更高的整体灵活性;设计了不同的步态,根据所处环境和任务需求,机器人可以切换至相应的步态模式以应对不同的地形障碍。
