
目前,随着人工智能机器人的出现,它们在各行各业的应用越来越广泛,尤其是在服务行业,对仿生机器人的要求也越来越高。人们对机器人的需求不断增加,不仅要求其基本功能,还希望在精神层面上有更大优势。因此设计仿生机器人眼,要求其能够通过机械结构传动实现各部位的独立运动,模仿真人眼球动作,加入电控或者其他结构设计进行多部位协同的自动控制,使模拟更真实。
眼球可实现360°自由转动
眼皮可实现上下眼皮同步开合,灵活运动
机构通过曲柄、连杆、销轴、孔槽等多结构配合实现联动交互
机构在现有材料条件下尽可能实现了小型化。
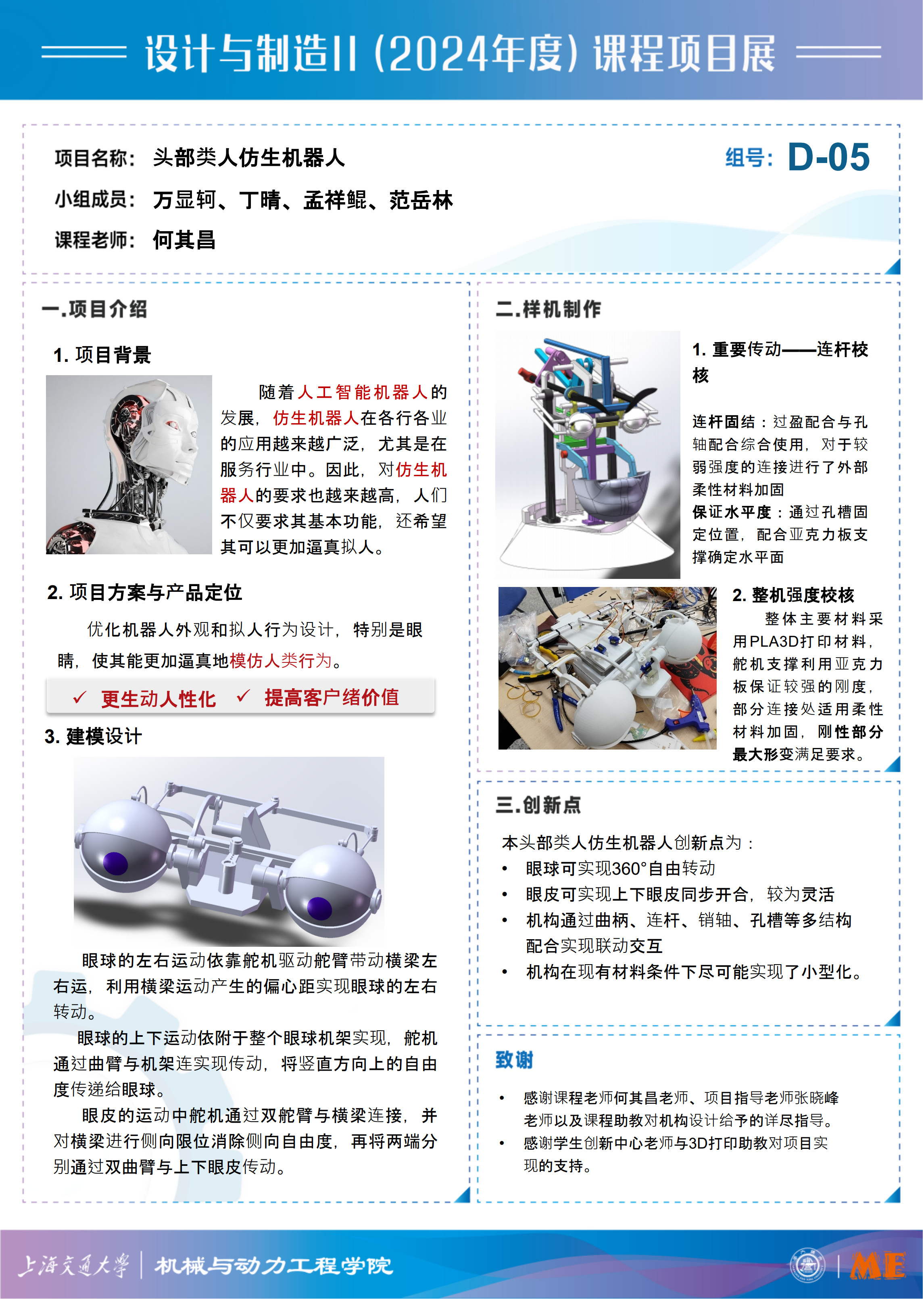
眼球的左右运动依靠舵机驱动舵臂带动横梁左右运动,利用横梁运动产生的偏心距实现眼球的左右转动。眼球的上下运动依附于整个眼球机架实现,舵机通过曲臂与机架连实现传动,将竖直方向上的自由度传递给眼球。眼皮的运动中舵机通过双舵臂与横梁连接,并对横梁进行侧向限位消除侧向自由度,再将两端分别通过双曲臂与上下眼皮传动。
