

本项目针对挑战赛的具体要求,设计并制造了一款高效的越障机器人。机器人专注于在规定的轨道上稳定且快速地越过不同类型的障碍,旨在通过简化设计、优化机械结构和提高越障效率来实现在尽可能短的时间内越过挑战赛赛道,并取得一个较好的排名。
(1)越障能力:设计一个高效的机械结构,确保机器人能够越过多种比赛规定的障碍物
(2)结构简化:通过模块化设计,降低系统复杂度,确保机器人具备稳定性和可靠性。
(3)性能优化:在动力输出、平衡控制和越障速度之间寻找最佳平衡点,以实现比赛中快速而稳健的表现。
(4)成本控制:在有限的资源和预算下,完成功能设计并制造符合比赛要求的机器人。
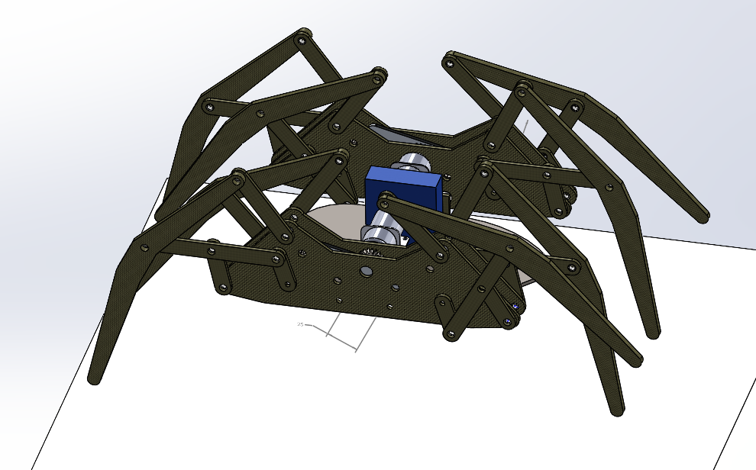
(1)机械设计:采用简单且高效的越障机械结构,包括权前膝后肘式和八足蛛式设计,确保机器人能够顺利越过规定轨道上的障碍。
(2)动力系统优化:搭载了稳定的驱动电机和传动系统,确保越障时的动力充足且运行平稳。
(3)越障效率提升:通过多次建模仿真和实验调整,优化了机器人在不同障碍物上的越障动作,使其越障效率和成功率达到比赛要求。
(4)比赛验证:成功完成了多轮仿真测试和比赛场地试验,机器人顺利通过了规定的比赛障碍,达到了预期目标。
