

本项目致力于研发一款八足式越障机器人,旨在提升机器人在复杂地形中的适应性和越障能力。该机器人采用对称性设计,仅需两个电机即可驱动八个足部,实现稳定行走。通过复式曲柄摇杆机构,仿照生物行进方式,使机器人重心低、步幅大、行动稳,能够巧妙协调腿部动作跨越障碍。项目在设计中充分考虑了稳定性、地形适应性、负载能力以及故障冗余性,同时在电机选择、电控设计和材料选择等方面进行了精心考量,以确保机器人的性能和可靠性。
1.设计并制造一款八足式越障机器人,使其在复杂地形中具有出色的适应性和越障能力,能够跨越各类障碍物。
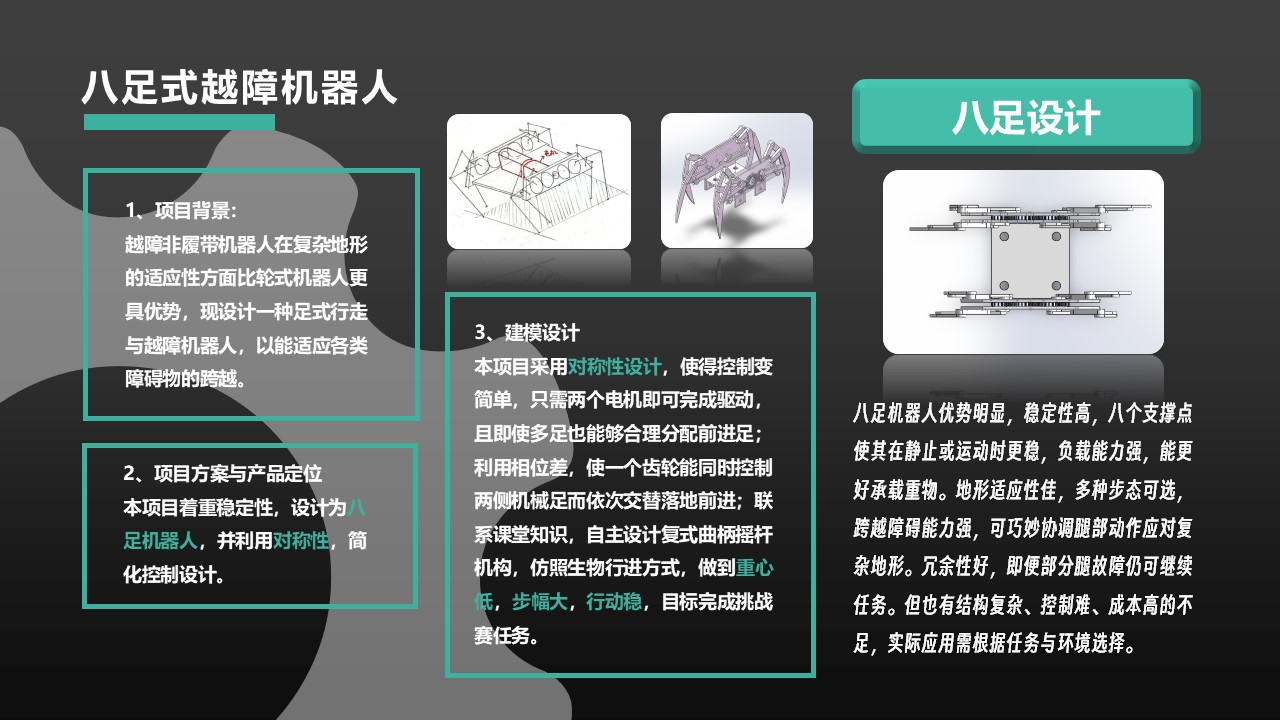
2.采用对称性设计,简化控制逻辑,仅用两个电机驱动八个足部,实现机器人的稳定行走和高效驱动。
3.利用复式曲柄摇杆机构,仿照生物行进方式,使机器人具备重心低、步幅大、行动稳的特点,提升其在复杂地形中的通过性。
4.选择合适的电机、电控系统和材料,确保机器人在重量、力矩、控制灵活性和结构稳定性等方面达到最佳平衡,满足实际应用需求。
成功研发出八足式越障机器人,实现了对称性设计下的稳定行走与高效驱动。复式曲柄摇杆机构的应用,让机器人在复杂地形中表现出色,重心低、步幅大且行动稳定。选用的12V直流减速电机及ARDUINO电控系统,确保了动力与控制的可靠性。亚克力板的使用,平衡了结构稳定性和轻量化需求。
