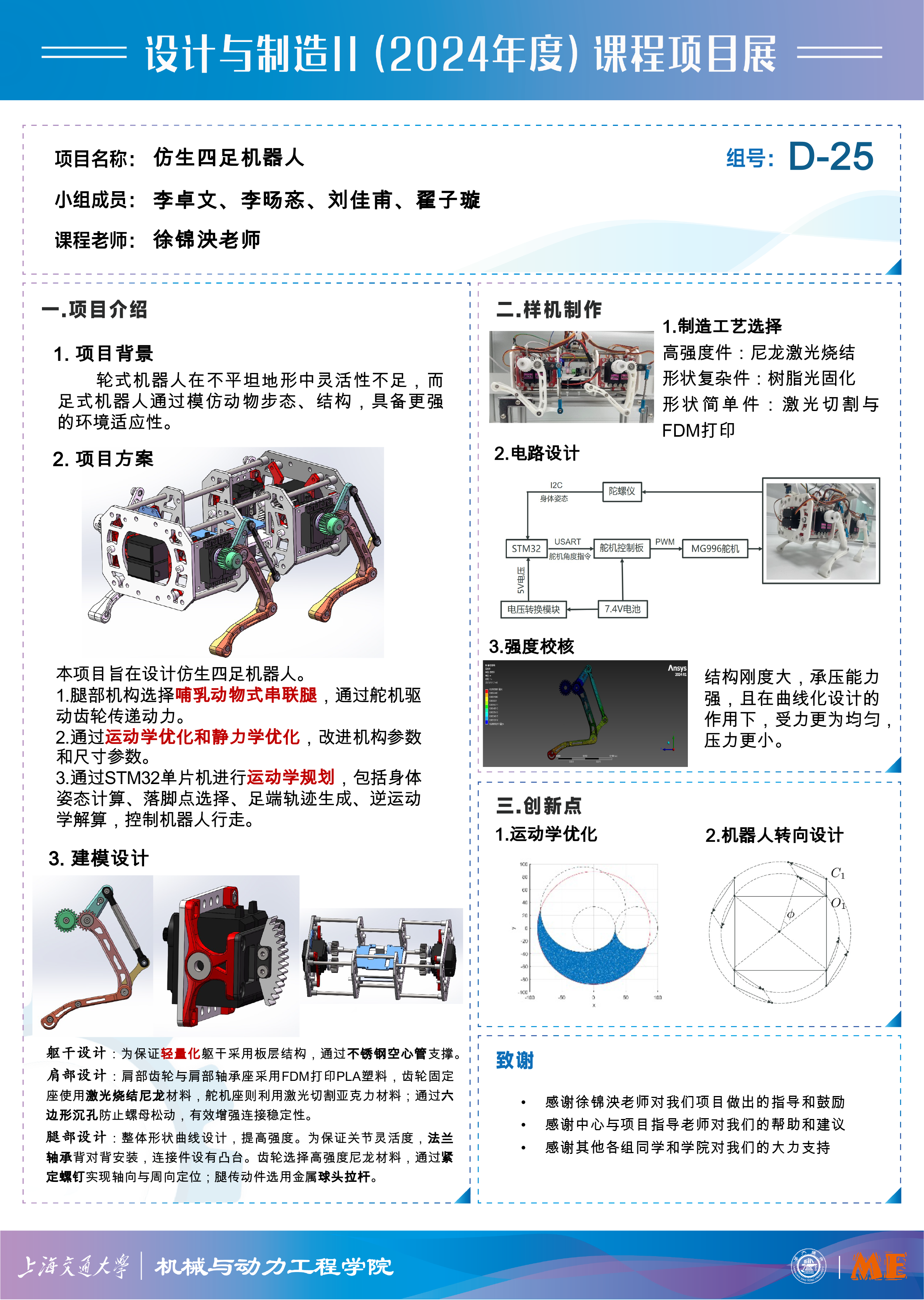
本项目旨在设计仿生四足机器人。
1.腿部机构选择哺乳动物式串联腿,通过舵机驱动齿轮传递动力。
2.通过运动学优化和静力学优化,改进机构参数和尺寸参数。
3.通过STM32单片机进行运动学规划,包括身体姿态计算、落脚点选择、足端轨迹生成、逆运动学解算,控制机器人行走。
能够实现四足机器人姿态可控与行走步态
设计了一款仿生四足机器人,并完成样机制作,通过STM32单片机控制机器人的运动