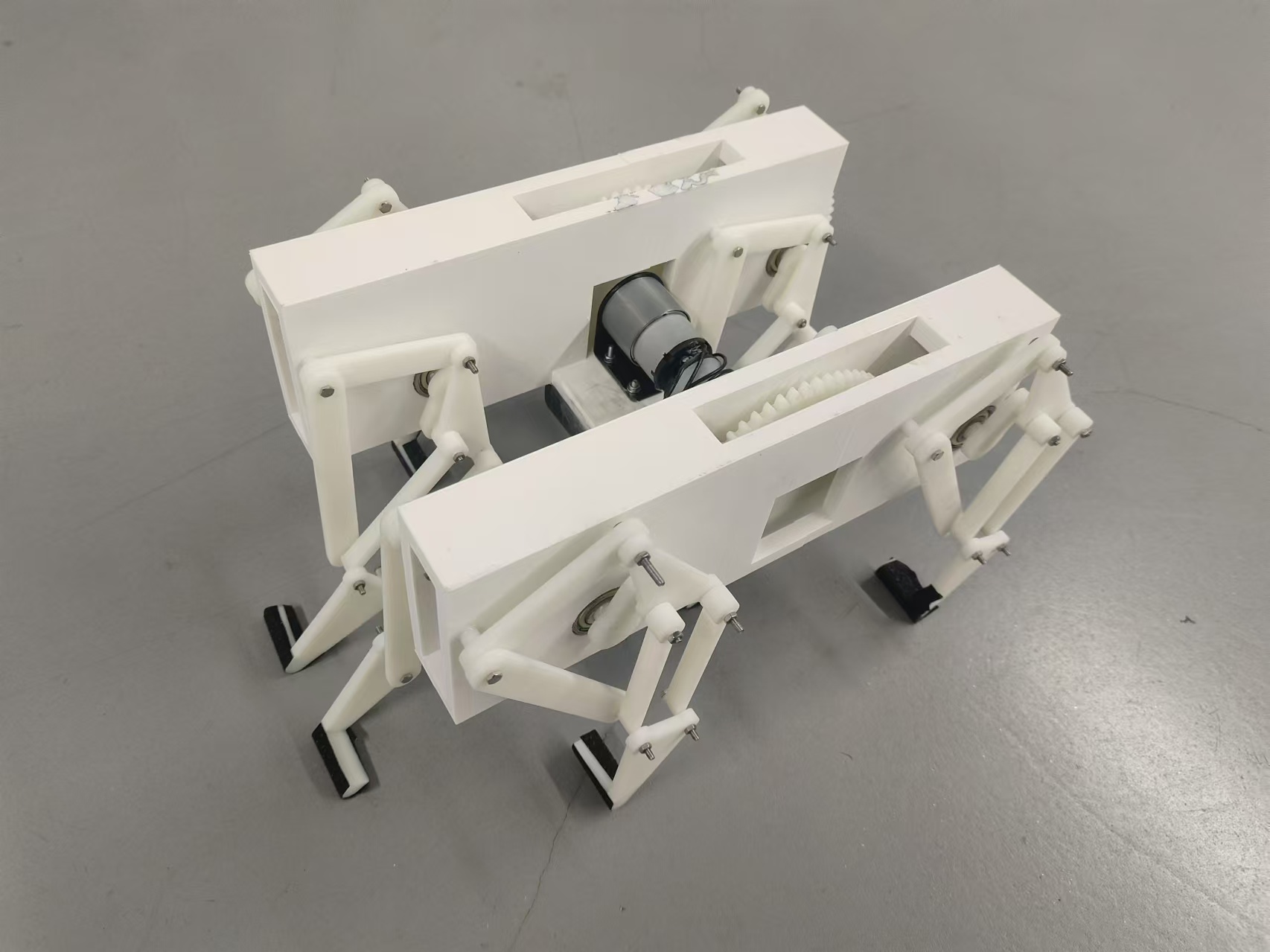
为了满足课程要求并夯实课程内容,我们采用连杆、齿轮等机构设计一款仿生足式越障车,通过齿轮传动带动其足式连杆机构完成小车的行进,并使小车能够完成斜坡、门洞、凹坑三种地形的越障。
设计出一款腿部为连杆机构的八足足式越障车,并采用齿轮等结构进行传动。
八足足式越障车能够保持直线且平稳前进,在电机扭矩足够时能够通过一定坡度的坡道。