复杂地形地貌的探查移动搜救中,传统的腿 式、履带式、轮式机器人各存在其不足与缺陷, 寻找灵活稳定的运动方式以适应复杂地形地貌, 突破固有技术壁垒成为当前一个重要问题。
本项目针对地震搜救等极端恶劣复杂环境设计 跳杆式核心机构实现移动机器人在各恶劣地形下通 过跳跃—翻滚—移动完成搜救探查作业任务。
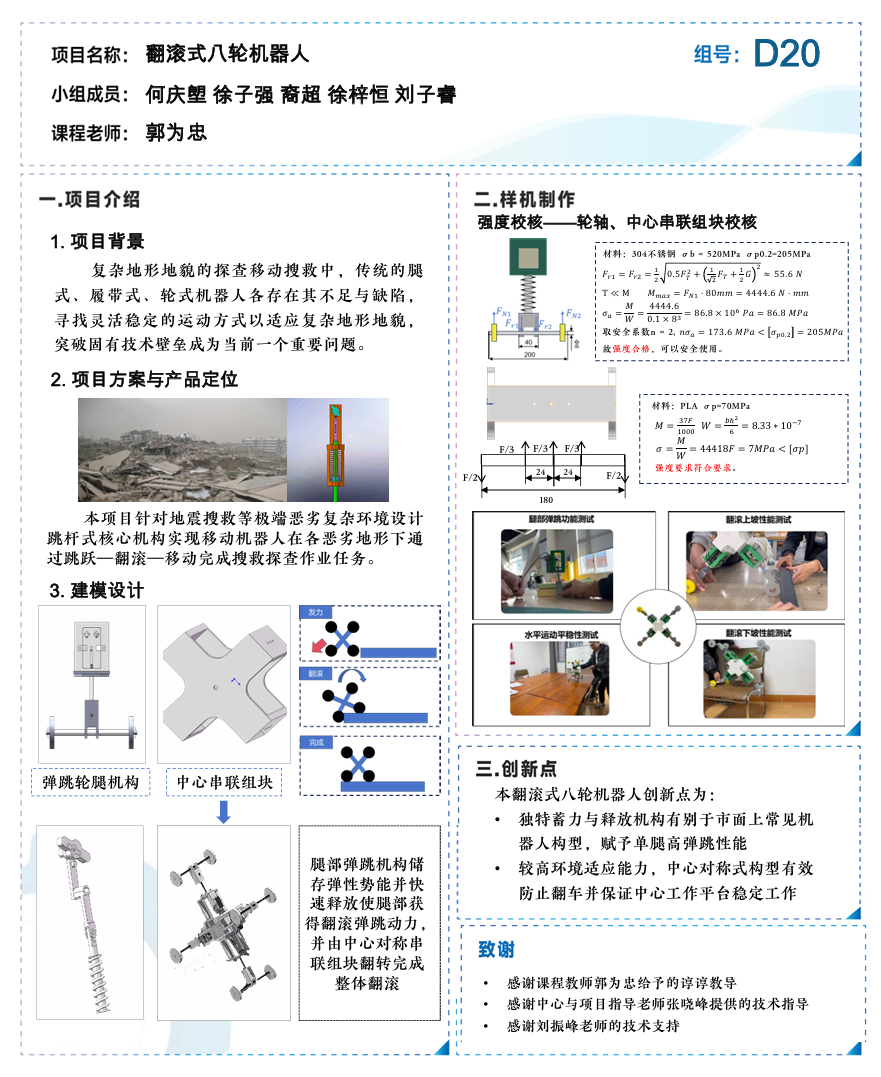
本翻滚式八轮机器人创新点为:
•独特蓄力与释放机构有别于市面上常见机器人构型,赋予单腿高弹跳性能
•较高环境适应能力,中心对称式构型有效防止翻车并保证中心工作平台稳定工作